NETD stands for Noise-Equivalent-Temperature-Difference
NETD is a figure-of-merit that characterizes an Infrared camera system’s sensitivity. It can be represented with numbers and the lower the number, the more sensitive the camera. It is also defined as the minimum detectable temperature difference between an object and its background. In other words, NETD is the temperature difference that provides a signal-to-noise ratio of 1. So, if the NETD of a camera is 100mk (or 0.1°C) it can theoretically discern a 25.1°C drone against a 25.0°C sky.
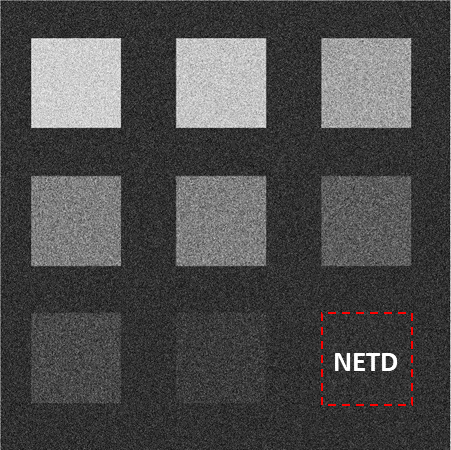
In the figure 1 and 2 each square represents a target with decreasing thermal contrast. In figure 1 you can still see the 9th square and distinguish it from the background, even though it is very faint. When noise is added the ninth square of figure 2 is indistinguishable from the background.
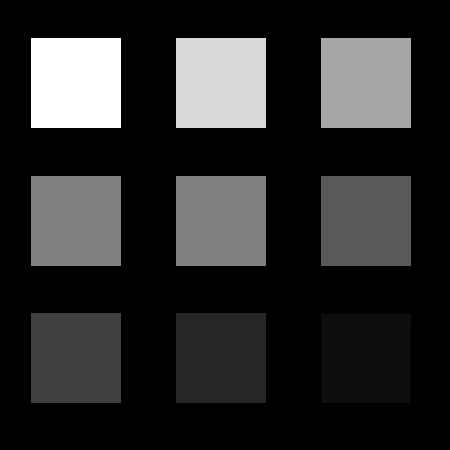
*Note that NETD is a measure of temporal noise (as opposed to spatial noise). Spatial noise is minimized by non-uniformity corrections (NUCs).
Why is NETD important?
NETD can be an important input into DRI (Detect, Recognize, Identify) range models because at long ranges there is extreme atmospheric attenuation causing the camera to become sensitivity limited (as opposed to resolution limited). NETD can also be used to flag production issues such as bad lens coatings, high noise electronics, or out of family detector performance. SOTI measures the NETD for every incoming Ventus HD sensor and compares it to manufacturer data to screen for these issues.

How to measure NETD
NETD can be calculated by dividing the temporal noise by the signal transfer function (SiTF). These are both measured quantities. We capture numerous, sequential frames of flood illumination with a Blackbody set to 20°C, 25°C and 30°C.
The 20°C & 30°C frames characterize the SiTF, while the 25°C frames characterize the temporal noise. The SiTF defines much brighter the image gets per temperature change.
*Note that NETD is measured on a per-pixel basis but is reported as an average. Vendors may throw out the NETD from so-called “bad pixels” from the average.
Can I use NETD to compare different cameras? Yes, but it is often misleading.
Three factors that can affect NETD are the lens, integration time, and spectral response. Therefore, you must be very careful when comparing the NETD of different camera systems.
1. Lens effects
The NETD listed on spec sheets are normalized for a F/1.0 lens with 100% transmission. However, NETD is proportional to F/# and F/#^2 for MWIR and LWIR respectively. For example, an LWIR camera with an advertised NETD of 30mk paired with an F/1.3 lens will have a lower sensitivity than another LWIR camera with an advertised NETD of 40mk paired with an F/1.0 lens. In addition, transmission is inversely proportional to NETD. Other effects such as relative illumination and vignetting can reduce the per-pixel NETD in the corners.
2. Integration time
Our MWIR cameras come with pre-set integration times. The integration time is how long the camera is collecting light per frame. A higher integration time increases signal, thus improving NETD. Sensor-level NETD are typically spec’d to the integration time the corresponds to a 50% well fill. However, different cameras reach 50% well fill at different integration times.
3. Spectral effects
It is an industry standard to measure NETD at a 25°C background temperature. However, the NETD can change as a function of background temperature. The reason for this is a concept called the Thermal Derivative which shows the change in flux is dependent on the temperature. For example, a change in 100.0 C to 100.1 C will have a greater delta in radiation than 25.0C to 25.1C. Therefore, the NETD is better at a 100C background than a 25C background.
The thermal derivative is also dependent on waveband (3-5um for MWIR vs 8-12um for LWIR). MWIR cameras are more sensitive to changes in background temperature than LWIR cameras. A change from a 20C to 25C background temperature will improve the NETD of a LWIR and MWIR camera by 5% and 17% respectively. This means that even if a LWIR and MWIR camera are both reported to have 40mk NETD, the MWIR is much more sensitive in environments hotter than room temperature. While this implies that LWIR cameras are more sensitive with colder backgrounds, MWIR cameras have the advantage of configurable integration times to bring sensitivity back up as needed.
Finally, factors such as atmospheric attenuation are spectrally dependent and will affect LWIR and MWIR cameras differently. This is one reason we measure and screen NETD on every incoming sensor rather than relying solely on manufacturer specs — small differences in lens, integration time, or background temperature can make published NETD numbers hard to compare directly. If you’re evaluating cameras for a specific application, our engineering team can help you think through what sensitivity actually means for your use case